
Cosmic Explorer
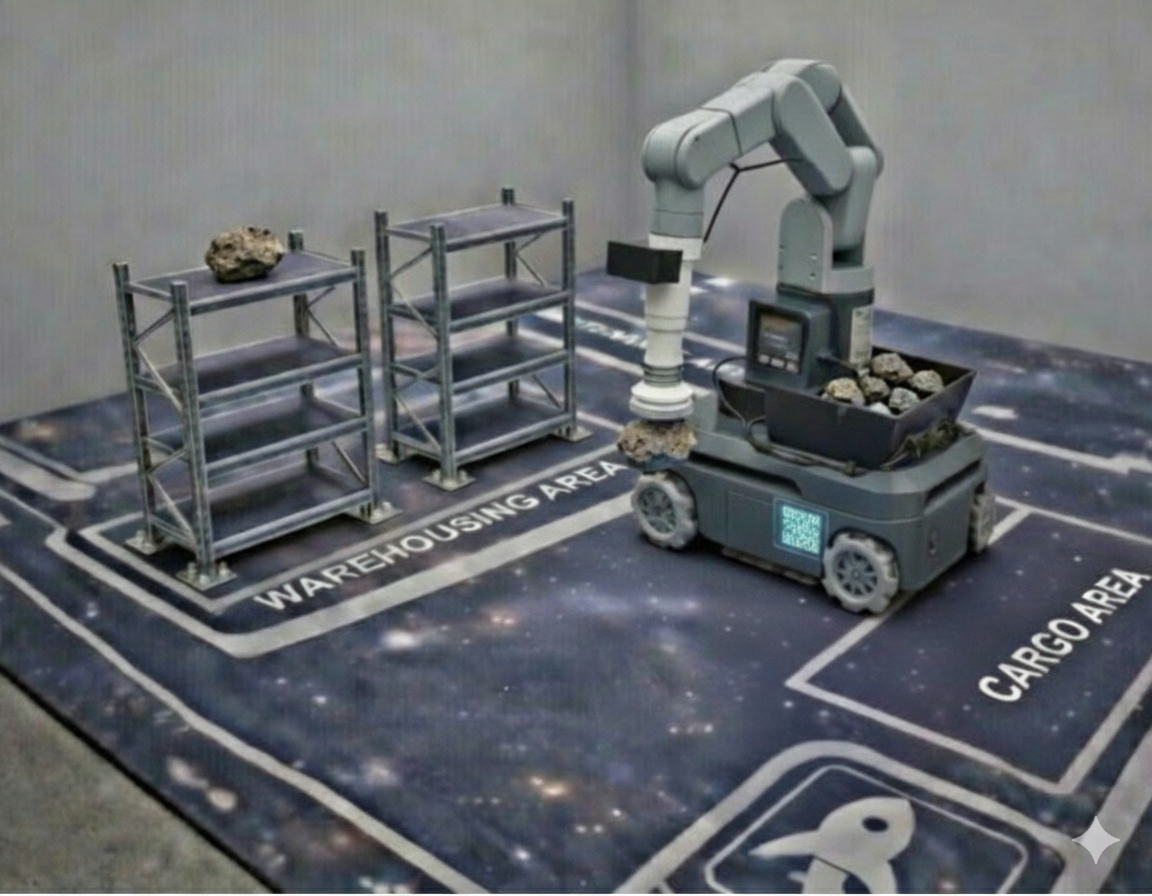
An advanced all-in-one educational ecosystem integrating a 6-DOF suction-based arm and an omnidirectional planetary rover. Master core robotics through simulated meteorite collection missions.
Aerospace Simulation Capabilities
Industrial-grade technologies optimized for deep-space classroom environments.
Deep Space SLAM Mapping
Equipped with 360° LiDAR to scan unknown craters and caves, generating high-precision 2D/3D occupancy grid maps in real-time. Empowers the rover to establish safe perimeters autonomously.
6-DOF Suction Arm
The mechArm 270, equipped with a vacuum suction pump, provides precise control for collecting various sizes of space rocks and meteorites.
Planetary Chassis
Mecanum omnidirectional mobility allows seamless traversal and on-the-spot rotation in confined terrains.
Galactic Academy Curriculum
From ground control initialization to fully automated Mars sample retrieval. 9 progressive missions.
Suction Arm Calibration
Initialize mechanical joints and test vacuum pressure via Blockly/Python programming to calibrate the arm for meteorite handling.
Rover Surface Navigation
Execute myAGV telemetry control and basic path planning to maneuver safely around simulated Martian terrain obstacles.
Spatial Kinematics Analysis
Calculate DH parameters to master spatial movement, crucial for positioning the suction nozzle accurately over rock surfaces.
Full System Automation
Integrate ROS architecture, vision, SLAM, and suction-rover collaboration for a fully autonomous "Base-to-Mine" meteorite return operation.
Autonomous Meteorite Collection Workflow
Experience the complete execution cycle of extraterrestrial sample acquisition using vacuum suction technology.

01 / Identify Rocks
The Astra Pro 2 depth camera scans the planetary surface, utilizing OpenCV algorithms to identify small space meteorites and determine the optimal flat surface coordinates for suction cup engagement.
02 / Suction Grab
Guided by visual coordinates, the 6-DOF arm positions its suction pump end-effector over the target. The vacuum is engaged, securely adhering to the meteorite's surface for lifting.

03 / Place & Transport
The arm moves the meteorite to the rover's secure transport bay. The suction pressure is released, gently depositing the sample for safe transport back to base.
Ready to Establish Your Space Lab?
Deploy the ultimate educational ecosystem for future aerospace engineers.